Four-finger robot hand developed in Harbin
(Xinhua)
Updated: 2006-06-27 15:10
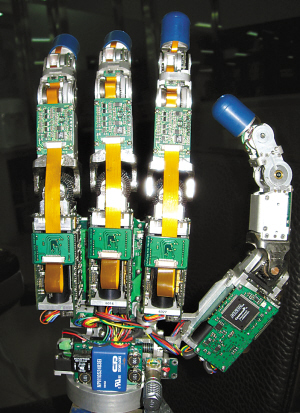
The interior structure of the robot hand. The four-finger robot
hand was co-devised by Harbin Institute of Technology and German Aerospace
Center, which consists of thirteen movable parts and can accomplish multiple
sense-and-action functions. [Xinhua]
|